







- 西南区厂家直销 FUNATEC...
- 厂家直销 MUSASHI武藏 ...
- AITEC艾泰克 Power-...
- 重庆上乘粘度计 TOKISA...
- 西南区厂家直销EIWA熔接机拉...
- 功能齐全 重庆内藤销售 KOB...
- 原装进口 静电测量仪 FMX-...
- 折叠耐久试验机 DLDMLH...
- SEN日森 UV硬化装置 台式...
- HID光源 HL - LGJ ...
- USHIO牛尾 照明设备 一般...
- 新品直销,OPK株式会社,托盘...
- 现货直销 SANEI三荣 BS...
- 现货直销 SANEI三荣 SD...
- 西南地区直销 MOUNTZ蒙士...
- DLDMLH-4U 折叠耐久...
- 折叠耐久试验机 DLDMLH-...
- 现货 DIT东日技研 超声波传...
- 现货 DIT东日技研 静电消除...
- 现货 DIT东日技研 喷嘴式/...
- 重庆内藤供应AITEC艾泰克L...
- AITEC艾泰克 氮置换BOX...
- AITEC艾泰克 晶圆UV照射...
- AITEC艾泰克 闪光灯设定数...
- AITEC艾泰克 LPDCH系...
- AITEC艾泰克 LMS 10...
- AITEC艾泰克 红外线照明 ...
- NDK日本电色 浊度/色度仪...
- 内藤代理 日本MUSASHI...
- 重庆内藤代理TND-4500K...
- 武藏MUSASHI点胶机sup...
- 针形控制阀NCV-17日本武藏...
- 日本HAKKO白光自动焊锡系统...
- 日本FLUORO福乐 小型真空...
- 日本MALCOM马康手持式粘度...
- 日本MUSASHI武藏数码控制...
- 日本MUSASHI武藏高精度...
- 日本MUSASHI武藏中国(重...
- INFLIDGE英富丽超级空气...
- 代理点胶机日本MUSASHI武...
- 内藤供应 日本MUSASHI武...
- 代理现货销售 TND-450...
- 日本FLUORO福乐小型真空泵...
- 日本MUSASHI武藏数码控制...
- 日本probe探头 耐500℃...
- INFLIDGE英富丽超级空气...
- SIGMAKOKI西格玛光机2...
- 针形控制阀NCV-17日本武藏...
控制器和伺服系统可根据从位置控制到**运动控制的目的进行选择。提供细粒度速度控制的各种变频器。
机器自动化控制器
Sysmac自动化平台的核心控制器
NX系列NX 701 CPU单元
适用于高达256轴的大型系统的高速,高精度控制
运动控制压倒性的性能改变了机器控制的概念
为了提高技术**带来的制造难度,解决生产现场的人员短缺问题,机器的功能和性能日益复杂。为了应对这一问题,NX 7机器自动化控制器已经推进了NX 7中进一步发展的高速,高精度机器控制概念。高精度的运动控制,*高速度为125微秒,指令执行速度明显加快,缩短了机器的生产周期,提高了操作的准确性。
【NX701-1□□0】
基本命令执行0.37 ns【业界*快】
运动控制125μs/ 8轴【业界*快】
配备英特尔®酷睿™ i7处理器(四核),指令执行性能大大提高(基本指令执行0.37 ns,双精度算术指令3.2 ns)。伺服电机和步进电机的指令值更新也可以在125μs的*大速度下执行,并且可以实现平滑的凸轮 操作和高度**的插补控制以及轴之间的相位调整。
整合序列控制和运动控制
顺序控制和运动控制可以集成在一个控制器中,传感器,模拟量输入/输出,伺服电机和步进电机的运行可以在同一个任务上进行。这使得可以将来自传感器的位置,位移和张力信息以高速且容易的方式反馈给运动控制。

抖动小于1μs的高精度反馈控制
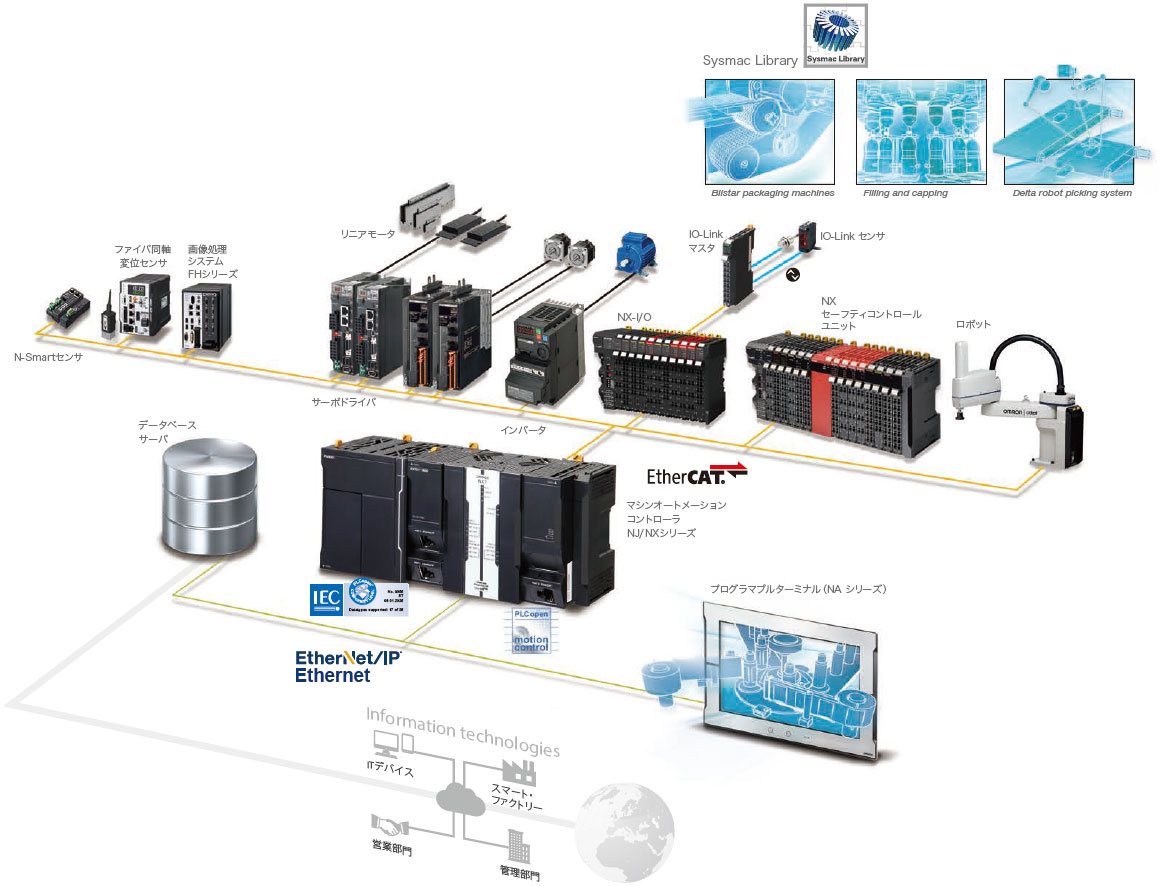
NJ / NX控制器可以在一个固定的周期内从输入到输出同步运行。内置于EtherCAT从单元,通过同步分布式时钟的时间,图像处理系统FH系列位移传感器ZW系列,I / O单元NX系列,伺服驱动器G5系列/ 1S系列等,各种单元之间的同步刷新时间。通过将输入/输出定时的偏差抑制到1μs或更少,可以实现高精度的反馈控制。
轻松实现**应用程序
软件功能部件集合的Sysmac库具有丰富的控制程序知识的功能块。我们支持各种高性能的机器控制,如在标记位置准确地切割胶片的旋转刀,物体输送时的振动抑制控制等,很容易在短时间内完成。
控制器快速**地收集信息站点信息的大数据
对于要求高附加值制造业,高质量稳定运行的制造业,首先要收集,可视化,分析现场信息。
NJ / NX控制器,实现大容量·高速通信·**连接,实现制造现场的信息化。
【NX701-1□□0】
内存容量260MB 【***别】
配备了260MB的大容量内存,你可以用越来越多,配方中的数据在设置更改的时间,以增加相对应,保证金也是生产力和提高质量的大量测试结果跟踪数据收集的。

【NX 701-1□□0】
以太网1 Gbps x 2【业界*快】
兼容千兆以太网通信端口的两个端口是标准设备,FTP服务器·还配备了客户端功能,可将大容量数据无压力地传输到上层系统。在EtherNet / IP通信中,可以以*高40,000pps的速度执行标签数据通信和CIP消息通信。

※标有◎或灰色背景的型号为标准型号。请与经销商联系无印良品的期限(订购生产型号)。
关于海外标准
·符号如下。U:UL,U1:UL(类2级危险位置认证的产品),C:CSA,UC:通过cULus,UC1:通过cULus(类2级危险位置认证的产品),CU:CUL,N:NK, L:Lloyd,CE:欧盟指令,RCM:RCM标志,KC:韩国无线电法律注册。
NX 701 CPU单元
| 产品名称 | 规范 | 功耗 | 格式 |
|
国外 标准 |
|||
|---|---|---|---|---|---|---|---|---|
|
计划 能力 |
可变容量 |
运动 数轴 |
||||||
|
NX 701 CPU 单元 
|
80 MB |
4MB: 电力切断保持 256MB: 断电不保持 |
256 |
40W (存储卡, 端盖 包括) |
形状NX 701 - 1700 |
|
UC 1, N,L, CE, RCM, KC |
|
| 128 | ◎ | 形状NX 701 - 1600 | ||||||
|
NX701 数据 基础 连接 CPU 单元 
|
4MB: 电源中断保持 256MB: 电源中断非保留 (对于CJ单元 包括存储器) |
256 | 表格NX 701-1720 |
UC 1, CE, RCM, KC |
||||
| 128 | 表格NX 701-1620 | |||||||
自动化软件Sysmac Studio
购买新产品时请购买DVD和许可证。DVD和许可证可以单独购买。DVD媒体不包括在许可证版本中。
| 产品名称 | 规范 | 格式 |
|
海 外 忠 评级 |
|||
|---|---|---|---|---|---|---|---|
|
许可证 的扫描次数 |
媒体 一 |
||||||
|
SYSMAC 工作室 标准 版 1版□□。 |
SYSMAC Studio是,NJ / NX系列 CPU单元和纽约系列工业 机械汽配等为PC mation控制器,EtherCAT的 设置,如奴隶和HMI,亲 明,调试,维护 源提供,一个集成开发环境 这是软件。 它在以下环境中运行。 操作系统: Windows 7中(32位版/ 64位版本)/ Windows 8中(32位版/ 64位版本)/ Windows 8.1中(32位版/ 64位版本)/ 的Windows 10(32位版/ 64位版本) SYSMAC一室公寓标准埃迪 在DVD介质和部署是, 以太网/ IP,DeviceNet的,串行 通信,显示动画(CX-Designer中) 每个工具已经出货。 详情请参阅产品信息。 |
无 (媒体 Anomi) |
DVD | ◎ | SYSMAC-SE 200 D. |
|
- |
|
1个执照 扫描版* 1 |
- | ◎ | SYSMAC-SE 201L |
|
- | ||
|
SYSMAC 工作室 团队开发 选项 * 2 |
SYSMAC工作室团队开发选项 ,该项目的版本控制功能 是一个许可证启用。 |
1个执照 扫描版* 1 |
- | 形成SYSMAC-TA401L |
|
- | |
* 1. Sysmac Studio提供多种许可的产品(3,10,30,50个许可证)。
* 2.此格式仅获得许可,因此请将其与Sysmac Studio标准版媒体(DVD)一起使用。
团队开发选项可以使用Sysmac Studio Ver。1.20或更高版本的CPU单元版本。
软件功能部件收集Sysmac库
请从下面的URL下载并安装到Sysmac Studio并使用它。
![]() http://www.fa.omron.co.jp/sysmac_library
http://www.fa.omron.co.jp/sysmac_library
代表形式
| 产品名称 | 规范 | 格式 |
|
|---|---|---|---|
|
阻尼控制 库 |
用于抑制机器运转产生的残余振动。 | 形成SYSMAC-XR006 |
|
|
设备运行监视 库 |
电动缸或传感器,监视设备的操作,例如一个电机时 被使用。 |
形成SYSMAC-XR008 | |
|
尺寸测量 库 |
光纤同轴位移传感器类型ZW-5000分之7000,并且智能 用于执行在接触感知传感器类型E9NC-TA0检查。 |
形成SYSMAC-XR014 |
注意:某些图书馆无法下载,请联系我们的销售代表。
推荐用于EtherCAT / EtherNet / IP通信电缆
对于EtherCAT,请使用5类或更多的STP电缆(带有铝带和编织层的双屏蔽双绞线电缆)。使用直线接线。
当使用带有EtherNet / IP的100BASE-TX / 10BASE-T时,请使用5类或更高的STP(屏蔽双绞线)电缆。
使用NX701时使用1000BASE-T时,请使用5e以上的STP电缆(铝带和编带的双重屏蔽)。
可以使用直通电缆或交叉电缆。
有连接器的电缆
| 产品名称 |
菜单 上 的蚊子 |
电缆 公牛 长度 (米) |
格式 |
|
|
||
|---|---|---|---|---|---|---|---|
|
大小 检测数 (LOG): AWG26× 4P 电缆 护套材料 质量:LSZH * 2 |
两侧连接器 电缆 (RJ45 / RJ45) RJ45连接器小 型* 1种 电缆颜色: 黄色* 3 
|
哦 -时间 俄罗斯 下来 股票 型 社会 ,公司 |
0.3 | ◎ | 形式XS6W-6LSZH8SS30CM-Y |
|
详情请咨询 TEL:18375760285 白先生 |
| 0.5 | ◎ | 形式XS6W-6LSZH8SS50CM-Y |
|
||||
| 1 | ◎ | 形状XS6W-6LSZH8SS100CM-Y |
|
||||
| 2 | ◎ | 形式XS6W-6LSZH8SS200CM-Y |
|
||||
| 3 | ◎ | 形状XS6W-6LSZH8SS300CM-Y |
|
||||
| 五 | ◎ | 形状XS6W-6LSZH8SS500CM-Y |
|
||||
|
尺寸· 线芯数 (对数): AWG 22 × 2 P |
与连接器两侧 的电缆 (RJ45 / RJ45) RJ45连接器鲁棒 型* 1种 电缆颜色: 浅蓝 
|
哦 -时间 俄罗斯 下来 股票 型 社会 ,公司 |
0.3 | ◎ | 形式XS5W-T421-AMD-K |
|
|
| 0.5 | ◎ | 形式XS5W-T421-BMD-K |
|
||||
| 1 | ◎ | 形式XS5W-T421-CMD-K |
|
||||
| 2 | ◎ | 形式XS5W-T421-DMD-K |
|
||||
| 五 | ◎ | 形式XS5W-T421-GMD-K |
|
||||
| 10 | ◎ | 形状XS5W-T421-JMD-K |
|
||||
|
插头两侧连接器 的数据线 (M12直 /直M12) 屏蔽加强连接器 库塔电缆规格 * 4 M12 Sumatoku 瑞克连接器 类型 电缆颜色:黑色 
|
哦 -时间 俄罗斯 下来 股票 型 社会 ,公司 |
0.5 | ◎ | 形状XS5W-T421-BM2-SS |
|
||
| 1 | ◎ | 形状XS5W-T421-CM2-SS |
|
||||
| 2 | ◎ | 形式XS5W-T421-DM2-SS |
|
||||
| 3 | ◎ | 形状XS5W-T421-EM2-SS |
|
||||
| 五 | ◎ | 形式XS5W-T421-GM2-SS |
|
||||
| 10 | ◎ | 形状XS5W-T421-JM2-SS |
|
||||
|
插头两侧连接器 的数据线 (M12直 / RJ45) 屏蔽加强连接器 库塔电缆规格 * 4 M12 Sumatoku 瑞克连接器 类型 RJ45连接器鲁棒 型 电缆颜色:黑色 
|
哦 -时间 俄罗斯 下来 股票 型 社会 ,公司 |
0.5 | ◎ | 形式XS5W-T421-BMC-SS |
|
||
| 1 | ◎ | 形式XS5W-T421-CMC-SS |
|
||||
| 2 | ◎ | 形式XS5W-T421-DMC-SS |
|
||||
| 3 | ◎ | 形式XS5W-T421-EMC-SS |
|
||||
| 五 | ◎ | 形状XS5W-T421-GMC-SS |
|
||||
| 10 | ◎ | 形状XS5W-T421-JMC-SS |
|
||||
* 1.小型电缆长度有0.2,0.3,0.5,1,1.5,2,3,5,7.5,10,15,20米。
刚性电缆的长度为0.3,0.5,1,2,3,5,10和15米。
有关详细信息,请参阅“工业以太网连接器目录”(目录号:CDJC - 006)。
* 2.低烟零卤素电缆用于控制面板接线。虽然LSZH型有单一的屏蔽屏蔽结构,但我们已经证实通信和噪声特性符合标准值。我们还有一个紧凑型PUR电缆,适用于控制面板外部的电缆敷设。
* 3.电缆的颜色也有绿色和蓝色。
通用规范
| 项目 | NX701形式 - □□□□ | |
|---|---|---|
| 结构 | 内置类型 | |
| 接地方法 | D类接地(3类地线) | |
| 轮廓(高×深×宽) | 100mm(H)×100mm(D)×132mm(W) | |
| 块 | 880克(含端盖) | |
| 电流消耗 | - | |
| 功耗 | 40瓦(包括存储卡和端盖) | |
| 使用环境 | 运行环境温度 | 0到55°C |
| 环境湿度 | 10至95%RH(非冷凝) | |
| 使用的气氛 | 没有腐蚀性气体 | |
| 储存环境温度 | -25至70°C(不包括电池和风扇单元) | |
| 使用高程 | 2000米以下 | |
| 污染程度 | 污染等级2或更低:符合JIS B 3502,IEC 61131-2 | |
| 噪声容限 | 符合IEC 61000-4-4标准的2 kV(电力线) | |
| 过电压类别 | 类别II:符合JIS B 3502,IEC 61131-2 | |
| EMC**等级 | B区 | |
| 耐振动 |
IEC 60068-2-6标准的 5〜8.4赫兹振幅3.5毫米,8.4〜150Hz的,加速度为9.8米/秒2 ,X,Y,Z每个方向百分钟(扫描时间10分钟×10扫描次数=总共100分钟) |
|
| 抗冲击性 |
IEC 60068-2-27 147 m / s 2 X,Y,Z方向3次(继电器输出单元100 m / s 2) |
|
| 电池 | 寿命 | 2.5年(25℃,通电时间率0%(不通电)) |
| 使用格式 | 形式CJ1W-BAT01 | |
| 合规标准 | cULus,符合欧盟指令,NK *,LR *,RCM,KC | |
*自2016年12月生产以来,兼容。它不符合NX 701-1□20。
性能规格
| 项目 | NX 701型 - | ||||
|---|---|---|---|---|---|
| 17□0 | 16□0 | ||||
| 处理时间 |
指令执行 时间 |
LD指令 | 0.37 ns〜 | ||
| 算术指令(双精度实型) | 3.2 ns〜 | ||||
|
编程 捣 |
程序 容量* 2 |
大小 | 80 MB | ||
| 数 | POU定义的数量 | 6000 | |||
| POU实例的数量 | 48000 | ||||
| 可变容量 |
保留属性 无* 3 |
大小 | 256 MB | ||
| 变量的数量 | 360000 | ||||
|
保留属性 是* 4 |
大小 | 4MB | |||
| 变量的数量 | 40000 | ||||
| 数据类型 | 数据类型的数量 | 8000 | |||
|
CJ单元 为存储器 (AT变量 由所述指定 可指定) |
通道I / O(CIO) |
型号NX 701-1□00: - 型号NX 701-1□20:0至6144通道(0至6143)* 5 |
|||
| 工作继电器(WR) |
型号NX 701-1□00: - 型号NX 701-1□20:0至512通道(W 0至W 511)* 5 |
||||
| 保持继电器(HR) |
型号NX 701-1□00: - 型号NX 701-1□20:0至1536个通道(H 0至H 1535)* 6 |
||||
| 数据存储器(DM) |
型号NX 701-1□00: - 型号NX 701-1□20:0至32768个通道(D 0至D 32767)* 6 |
||||
| 扩展数据存储器(EM) |
型号NX 701-1□00: - 型号NX 701-1□20:32768通道×25库* 7 (E 0 _ 0至E 18 _ 32767) |
||||
|
单元 配置 |
可安装 台数 |
1个机架(CPU机架或增加 每一套机架CJ单位) 的*大数量 |
- | ||
|
整个系统的CJ单元 的*大数目 |
- | ||||
|
整个系统的NX单元 的*大数目 |
4,096(在EtherCAT从站终端上) | ||||
| 扩展机架*大数量 | 0 | ||||
| 输入/输出点的数量 | CJ单位*大输入/输出点数 | - | |||
|
电源 (CPU机架 点击或增加 一套机架) |
格式 |
型号 NX - PA 9001 型号 NX - PD 7001 |
|||
|
电源故障 定时限 |
交流电源 | 30到45毫秒 | |||
| 直流电源 | 5到20毫秒 | ||||
|
运动 部署 控制 |
控制轴的数量 | 控制轴的*大数量 |
可以创建的*大轴数。 控制轴数量=运动控制轴数量+单轴位置控制轴数量 |
||
| 256轴 | 128轴 | ||||
| 运动控制轴 |
可以创建的运动控制轴的*大数量。 运动控制轴是所有功能都可以使用的轴。 |
||||
| 256轴 | 128轴 | ||||
| 使用的*大实际轴数 |
这是可以用作实轴的*大轴数。 轴的数量包括以下伺服轴和编码器轴。 |
||||
| 256轴 | 128轴 | ||||
|
使用运动控制 伺服轴 |
所有功能可以使用的伺服轴的*大数量。 使用运动控制伺服轴数量=“使用轴”和“伺服 轴的数目运动控制轴” |
||||
| 256轴 | 128轴 | ||||
| 线性插补控制*大轴数 | 每个轴组有4个轴 | ||||
| 圆弧插补控制轴的数量 | 每个轴组有2个轴 | ||||
| 轴组的*大数量 | 64轴组 | ||||
| 运动控制周期 | EtherCAT通讯的过程数据与通讯周期相同 | ||||
| 凸轮 |
凸轮 数据 点 |
每凸轮表 的*大点数 |
65,535点 | ||
|
在所有凸轮表 的*大点数 |
1,048,560点 | ||||
|
凸轮表 的表的*大数量 |
640桌 | ||||
| 位置单位 | 脉冲,毫米,微米,纳米,度,英寸 | ||||
| 覆盖 | 0.00,0.01至500.00% | ||||
|
Perife 拉尔 (USB) 端口 |
支持服务 | Sysmac Studio连接 | |||
| 物理层 | USB 2.0兼容B连接器 | ||||
| 传输距离 | *多5米 | ||||
|
集成的 以太网 / IP 端口 |
端口数 | 2 | |||
| 物理层 | 10 BASE-T / 100 BASE-TX / 1000 BASE-T | ||||
| 帧长度 | *大1514 | ||||
| 媒体访问方法 | CSMA / CD | ||||
| 调制方法 | 基带 | ||||
| 拓扑 | 星型 | ||||
| 传输速度 | 1 Gbit / s(1000 BASE-T) | ||||
| 传输介质 |
双绞线电缆(屏蔽:STP):5级 或5级 以上 |
||||
| 传输距离(集线器和节点之间的距离)*大值 | 100米 | ||||
| *大数量的级联连接 | 交换式集线器的使用没有限制 | ||||
|
CIP 服务: 标签数据 链接 (周期 里克通信 信号) |
*大连接数 | 256 /总计512 | |||
| 数据包间隔* 9 |
可以为每个连接设置 0.5到10,000毫秒(0.5毫秒的增量) |
||||
| 单位允许的通信频带 | 40,000 pps * 11(包括心跳) | ||||
| 标签设置*大数量 | 256 /总计512 | ||||
| 标签类型 | 网络变量 | ||||
|
1个连接(= 1个标签 每套号标签) |
8(如果您将控制器状态包含在标记集中,则为7) | ||||
| *大数量的标签 | 256 /总计512 | ||||
|
每个节点链路的*大 数据大小 (所有标签的总大小) |
369,664字节 (739,328字节 2总计) |
||||
|
每个连接的*大 数据大小 |
1,444字节 | ||||
| 可以注册的标签组的*大数量 | 256 /端口共512(1连接= 1标签集) | ||||
| 1个标签集的*大尺寸 |
1444个字节 (如果标签集包括控制器状态2服务器 使用该网站的内容) |
||||
|
组播数据包 过滤功能* 13 |
是的 | ||||
|
CIP 信息 服务: 显式 消息 |
第3类(连接数) | 128 /总计256(客户端+服务器) | |||
|
UCMM (非连接 动作 型) |
可能的同时通信 的客户端的*大数量 |
32 /端口共64 | |||
|
可能的同时通信 服务器的*大数量 |
32 /端口共64 | ||||
| TCP套接字的数量 | 三十 | ||||
|
集成 以太网 CAT 端口 |
通信标准 | IEC 61158类型12 | |||
| EtherCAT主规范 | B类兼容(Feature Pack Motion Control兼容) | ||||
| 物理层 | 100 BASE-TX | ||||
| 调制方法 | 基带 | ||||
| 传输速度 | 100 Mbit / s(100 BASE-TX) | ||||
| 双面模式 | 汽车 | ||||
| 拓扑 | 线,菊花链,分支接线 | ||||
| 传输介质 |
5类或更多的双绞线电缆 ( 建议使用带铝带和编织层的双屏蔽屏蔽电缆 ) |
||||
| 节点之间的*大距离 | 100米 | ||||
| *大数量的奴隶 | 512 | ||||
| 可配置的节点地址范围 | 1至512 | ||||
| 过程数据的*大尺寸 |
IN:11472个字节 OUT:11472个字节 然而,8个帧(进程*大数目的数据帧)的范围 是囲内 |
||||
| 一个从机的*大尺寸 |
IN:1,434字节 OUT:1,434字节 |
||||
| 通信周期 |
初级周期性任务 125微秒 250微米〜8毫秒 (在250μs的单位可配置的) ,周期性任务(执行优先级5) 125微秒 250微米〜100毫秒 (在250μs的单位配置) |
||||
| 同步抖动 | 1μs或更少 | ||||
| 内部时钟 |
环境温度55℃:月差-3.5分钟至0.5分钟 环境温度25℃:月差-1.5分钟至1.5分钟 环境温度0℃:月差-3分钟1分钟 |
||||
* 1.对应硬件版本“A”。
* 2.执行对象的容量,变量表(变量名等)。
* 3.不包括CJ单元内存的HR,DM和EM。但是,NX 701-1□20包含CJ单元的存储器。
* 4.不包括CJ单元存储器的CIO和WR。但是,NX 701-1□20包含CJ单元的存储器。
* 5.可以为每个频道设置。使用变量内存而不保留属性。
* 6.可以为每个频道设置。保持属性使用可变内存。
* 7.对于型号NJ501-1□20,启用假脱机功能时,E9_0〜E18_32767用于DB连接服务。
对于NJ101-□□20型号,当阀芯功能启用时,E1_0至E3_32767用于DB连接服务。
对于NX 701-1□20,使用假脱机功能专用区域。因此,即使spool函数是有效的,我们也不使用具有保持属性的变量存储器。
* 8. CPU单元版本1.06或更高版本和Sysmac Studio版本1.07或更高版本的轴数。否则*大控制轴数为8轴(NJ 301 - 1200型)和4轴(NJ 301 - 1100型)。
* 9.无论节点数量如何,数据都会在设定的周期内在线上更新。
* 10。CPU单元Ver。之前的时间为10到10,000 ms(1 ms增量)。
* 11.pps表示每秒数据包数,表示每秒可处理的数据包发送和接收数。
* 12.在CPU单元版本1.02之前,它是1,000 pps。
* 13.由于EtherNet / IP端口实现了IGMP客户端,因此可以使用支持IGMP Snooping的交换集线器进行不必要的组播数据包过滤。
* 14。CPU单元Ver。
* 15。NJ301 CPU单元Ver.1.02或更早版本是1,000 / 2,000 / 4,000μs。使用NJ501-4□□0进行机器人控制时,EtherCAT通信周期为1ms以上。
注使用NJ501-4□□0型机器人控制时,请使用G5系列/ 1S系列交流伺服驱动器EtherCAT通信内置型,使用**式编码器,制动器型。
功能规格
| 项目 | NX701形式 - □□□□ | |||
|---|---|---|---|---|
|
任务 功能 |
功能 |
在指定执行条件和执行优先级的“任务”单元 中执行I / O 刷新和用户程序执行的功能 |
||
|
在恒定的周期 执行 任务 |
主要周期性 任务*大数量 |
1 | ||
| 定期任务*大数量 | 4 | |||
|
满足条件 在运行时 到 任务 |
事件任务 *大数量 |
32 | ||
| 执行条件 |
事件任务的启动指令被执行时 在可变的匹配条件表达式 |
|||
| 设置 | 系统服务监控设置 | - | ||
|
编程 拉敏 变灰功能 |
POU (计划 组织 单位) |
一个程序 | 要分配给任务的单元的POU | |
| 功能块 | 创建具有状态的部件时使用的POU | |||
| 功能 |
这样的处理,输出到输入**地创建组件确定 当使用POU |
|||
|
程序 语言 |
样 |
梯形图* 2 结构化文本(ST) |
||
| 命名空间* 3 | 能够按名称对POU进行分组 | |||
| 变量 |
可变的 外部参考 功能 |
网络变量 |
访问,例如从显示装置和上位PC,其它控制器 功能,允许 |
|
| 数据类型 |
基本 数据类型 |
布尔类型 | BOOL | |
| 位串类型 | BYTE,WORD,DWORD,LWORD | |||
| 整数类型 |
INT,SINT,DINT,LINT,UINT,USINT,UDINT, ULINT |
|||
| 真正的类型 | 真的,LREAL | |||
| 时长类型 | TIME | |||
| 日期类型 | DATE | |||
| 时间类型 | TIME_OF_DAY | |||
| 日期和时间类型 | DATE_AND_TIME | |||
| 字符串类型 | STRING | |||
| 派生数据 | 结构类型,联合类型,枚举类型 | |||
| 结构类型 | 功能 | 能够一起处理不同数据类型的多个数据 | ||
| *大成员数量 | 2048 | |||
| *大嵌套级别 | 8 | |||
| 会员的数据类型 | 基本数据类型,结构类型,联合类型,枚举类型,数组变量 | |||
|
偏移构件的 指定 |
将结构成员放置在任意内存位置的功能* 3 | |||
| 联盟类型 | 功能 |
对于同样的数据,您可以访问多个不同的数据类型的 功能,让 |
||
| *大成员数量 | 4 | |||
| 会员的数据类型 | BOOL,BYTE,WORD,DWORD,LWORD | |||
| 枚举类型 | 功能 |
它是由一个标签(字符串),该变量的值是作为一个“枚举”简称表示 功能 |
||
|
所述的数据类型 属性 |
数组规格 | 功能 |
能够从数字(下标)开始统一指定相同数据类型的元素, |
|
| *大数量的尺寸 | 3 | |||
| 元素的*大数量 | 65,535 | |||
|
的FB实例 阵列规范 |
可能 | |||
| 范围规格 |
预先确定的范围内的值不仅可以采取 海胆演示功能 |
|||
| 图书馆* 3 | (用户)库 | |||
|
运动 部署 控制 |
控制模式 | 位置控制,速度控制,转矩控制 | ||
| 轴类型 |
伺服轴,虚拟伺服轴,编码器轴, 虚拟编码器轴 |
|||
| 可管理的职位 | 指挥位置,反馈位置 | |||
| 单轴 |
单轴 位置控制 |
**值定位 | 指定**坐标的目标位置并进行定位的功能 | |
| 相对价值定位 |
从电流指令位置指定的行驶距离,定位 功能 |
|||
|
中断上浆位置 决定 |
从那里发生由外部输入的中断输入的位置的移动距离 指定,定位功能 |
|||
|
循环同步 **位置控制* 1 |
位置控制模式下每个控制循环输出指令位置的功能 | |||
|
单轴 速度控制 |
速度控制 | 在位置控制模式下执行速度控制的功能 | ||
|
循环 同步速度控制 |
在速度控制模式下,在每个控制循环中输出速度指令的功能 | |||
|
单轴 转矩 控制 |
转矩控制 | 能够控制电机扭矩 | ||
| 单轴 |
单轴 同步控制 |
开始凸轮 操作 | 使用指定的凸轮表启动凸轮* 操作的功能 | |
| 释放凸轮 动作 | 结束由输入参数指定的轴的凸轮 * 操作的功能 | |||
| 开始齿轮 操作 | 设定主轴与从动轴之间的齿轮比,进行齿轮动作 | |||
| 定位齿轮 动作 |
齿轮* 操作设置位置,以与主轴和从动轴之间的传动比被同步 为功能 |
|||
| 释放齿轮动作 | 可取消行驶档位操作和位置指定档位操作 | |||
| 梯形图案凸轮 | 与指定的主轴同步进行定位的功能 | |||
|
主轴相对值相位 校正 |
在同步控制中执行主轴的相位修正功能 | |||
| 加/减定位 |
通过将两轴或减去值的指令位置而得到的值,指令位置 输出作为功能 |
|||
|
单轴 手动操作 |
允许操作 |
由伺服驱动器的状态切换到伺服ON的状态中,轴向驱动 功能,以使操作 |
||
| 慢跑饲料 | 根据指定的目标速度执行点动进给的功能 | |||
|
单轴 控制援助 |
轴错误重置 | 能够取消轴故障 | ||
| 原 点返回 |
动电机中,使用限制信号,主传感器,一个原 点信号 函数用于确定所述机械原 点具有 |
|||
|
参数指定原 点 回归* 1 |
移动指定参数马达,限制信号,原 点接近 功能,其通过使用信号来确定机器原 点,点信号 |
|||
| 高速归位 |
“0”的**坐标和目标位置的,定位执行,到点 函数返回 |
|||
| 强制停止 | 减速和停止轴的功能 | |||
| 立即停止 | 能够立即停止轴 | |||
|
覆盖值 集 |
能够改变目标轴速度 | |||
| 当前位置变化 |
改变电流指令位置和轴的为任意值的反馈当前位置 为进一步的功能 |
|||
| 外部锁存器有效 | 能够通过触发器生成来记录轴的位置 | |||
| 无效的外部锁存器 | 能够使运行闩锁无效 | |||
| 区域监视 |
命令位置或轴的反馈当前位置,指定 功能判断是否在范围之内本(区) |
|||
|
数字式凸轮 开关启用* 4 |
根据轴位置可以打开或关闭数字输出 | |||
| 监视轴之间的偏差 |
指令位置和指定两个轴反馈位置之间的差 的能力来监视是否不超过允许值 |
|||
|
偏差计数器 复位 |
电流指令位置与反馈当前位置到零之间的偏差 的函数 |
|||
| 转矩极限 |
启用/禁用伺服驱动器力矩限制函数 通过设定转矩限制值来限制输出扭矩 能力 |
|||
| 指令位置修正* 5 |
启用/禁用伺服驱动器力矩限制函数 通过设定转矩限制值来限制输出扭矩 能力 |
|||
| 起步速度* 6 | 用于修正正在运行的轴的位置 | |||
| 轴组 |
多轴协调 控制 |
**值线性插值 | 能够设置轴运动开始时的初始速度 | |
| 相对值线性插值 | 能够指定**位置并执行线性插值 | |||
| 2轴圆弧插补 | 通过指定相对位置来执行线性插值的功能 | |||
|
轴组 循环同步 **位置控制 |
执行两个轴的圆弧插补的功能 | |||
|
多轴协调 控制辅助 |
轴集团 错误复位 |
能够取消轴组和轴异常 | ||
| 轴组有效 | 功能启用轴组的操作 | |||
| 无效的轴组 | 能够使轴组的操作无效 | |||
|
轴集团被迫 停止 |
在插补操作中减速和停止所有轴的功能 | |||
| 轴组立即停止 | 在插补运行中立即停止所有轴的功能 | |||
|
轴集团 覆盖 值设置 |
在插补操作中改变复合目标速度的功能 | |||
|
轴集团的地位 收购 |
轴组和反馈的电流指令位置获取的当前位置 的功能* 3 |
|||
|
轴组配置轴 写 |
轴组参数配置轴,暂时改写 功能* 3 |
|||
| 常见 | 凸轮 |
凸轮表 属性更新 |
在输入参数中指定的凸轮表的终点指数 函数来更新 |
|
| 保存凸轮表 |
通过在CPU单元中的输入参数指定的凸轮表 的功能是存储在非易失性存储器 |
|||
|
生成凸轮表 * 7 |
凸轮性能和Kamunodo在输入参数中指定 生成CAM表的功能 |
|||
|
帕拉 米 |
MC设置写入 |
一些轴参数和轴组的参数,临时 功能改写 |
||
|
更改轴参数 * 7 |
能够从用户程序中引用/更改轴参数 | |||
| 辅助功能 | 计数模式 |
线性模式(有限长)或旋转模式(无限的长度) 可以被选择 |
||
| 单位转换 | 各轴的显示单位可以根据机器进行设定 | |||
|
加减速 控制 |
自动加速/减速控制 |
设置时间轴,并在加加速度操作所述轴组的加速和减速曲线 函数 |
||
| 改变加速/减速 | 即使在加减速运转中也能改变加减速的功能 | |||
| 在位检查 |
就位宽度和在检查定位的完成 功能设置位置确认时间 |
|||
| 停止方法选择 |
停止侧时紧急停止输入信号,并且限制了输入信号变为有效 功能用于设置方法 |
|||
| 重新启动运动控制指令 |
重新启动来改变运动控制指令的输入变量正在执行 由操作期间改变目标值的能力 |
|||
|
运动控制指令的多个 启动(缓冲器模式) |
执行时,在操作过程中启动另一个运动控制指令启动 能力,以指定操作定时之间的连接速度 |
|||
|
连续操作轴组操作 (转换模式) |
通过操作轴组的多个激活指定连续操作的方法 的功能 |
|||
| 监视功能 |
软件 限制 |
能够监视轴的运动范围 | ||
| 位置偏差 |
的电流值和所述轴的反馈电流值指令之间的位置偏差 功能监视 |
|||
|
速度/加速/减速/ 转矩/插补速度/ 插补加减速 |
设定报警值对于每个和每个轴组轴,监测 功能 |
|||
| **编码器兼容 |
OMRON伺服驱动器G5系列或系列1S ,通过使用编码器摩托的**值,在电源接通 特征来消除的归巢 |
|||
| 输入信号的逻辑反转* 6 |
立即停止输入信号,前向限制输入信号,负方向限制输入信号 用于反转号功能,逻辑原 点接近输入信号 |
|||
| 外部I / F信号 |
可以使用伺服驱动器侧的以下输入信号 :原 点信号,原 点信号,正方向限位信号, 负方向限位信号,立即停止信号,中断输入信号 |
|||
|
单元 门(输入 输出) 管理 功能 |
EtherCAT 从站 |
*大数量的奴隶 | 512 | |
|
CJ系列 单元 |
*大单位数量 | - | ||
|
通讯 功能 |
外设(USB)端口 | 功能与个人电脑上的各种支持软件进行通信 | ||
|
内置 的EtherNet / IP端口 内部通信 端口 |
通信协议 | TCP / IP,U DP / IP | ||
|
CIP通信 服务 |
标记数据链接 |
该设备和程序减少对EtherNet / IP网络 的功能来周期性地执行数据交换 |
||
| 消息通信 |
在EtherNet / IP网络的设备和可选的CIP命令 发送和接收去的功能 |
|||
|
TCP / IP 功能 |
CIDR |
IP地址不使用IP地址类(A类〜C类) 功能执行的少分配 |
||
|
IP转发 * 5 |
IP数据包之间的接口传输功能 | |||
|
TCP / IP 应用 案例 和部署 |
套接字服务 |
在UDP或TCP协议,上的Eth ERNET任何节点 由和用于通信的指令的任何官能插座来发送和接收数据 执行日功能 |
||
| FTP服务器 |
能够在以太网上从其他计算机读取和写入控制器CPU 单元的SD存储卡中的 文件 |
|||
|
FTP客户端 * 7 |
从CPU单元,其它计算机或CON以太网 对于控制器,执行由FTP文件传输的功能。 通过FTP客户端通信命令可以执行 |
|||
| 自动时钟调整 |
指定的时间或功率被接通在CPU单元, 在指定的预定的时间间隔,其获取从NTP服务器的时间信息 的功能,并更新的CPU单元的内部时钟信息 |
|||
| SNMP代理 |
使用SNMP Manager网络管理软件 提供的内部电子邮件的内部状态therNet / IP端口的信息的功能 |
|||
|
EtherCAT 端口 |
支持 服务 |
处理数据通信 |
定义在欧洲委员会,EtherCAT主设备和从设备之间 的数据交换的控制信息作为一定的周期的循环通信 的通信方法,用于执行 |
|
| SDO通信 |
定义在欧洲委员会,EtherCAT主设备和从设备之间 交换数据控制信息作为非周期性的事件通信 的通信模式 |
|||
| 网络扫描 |
读取所述从属设备的信息连接时,从配置 用于自动生成一个形成功能 |
|||
| DC(分布式时钟) |
同所有的EtherCAT设备(包括主设备) 的时间同步分享“的EtherCAT系统时间” 功能 |
|||
| 数据包监视器* 8 |
主存储由帧中发送的帧中接收 用于功能。 保存的数据可以用WireShark等来查看 |
|||
| 从机启用/禁用设置 |
从作为通信目标,或设定为无效或有效 恒定功能 |
|||
| 奴隶退出/重新加入 |
以进行维护,如辅交换机,EtherCAT网络 暂时拆卸/重新订阅从起作用适当的从属 |
|||
|
支持 应用 电缆 Shonpu 协议 |
欧洲委员会 |
上的EtherCAT从CAN应用的 功能发送消息(SDO) |
||
| 通讯指示 |
CIP通讯指令,套接字通讯指令,SDO信息指令, 非程序通讯指令* 9,FTP客户端指令,Modbus RTU 协议指令* 9 |
|||
|
操作 管理 功能 |
输出触点在操作期间 | 在运行模式下,电源单元的触点接通的功能 | ||
|
顺 Temù的 管理 功能 |
事件日志 | 功能 | 能够记录事件的发生 | |
| *大数量 | 系统事件日志 | 2048 | ||
| 访问事件日志 | 1024 | |||
| 用户事件日志 | 1024 | |||
|
调试 变灰 功能 |
在线编辑 | 一个地方 |
程序,功能块,功能, 功能进行修改,全局变量的在线 修改从多个运营商在网络中分离POU 可以 |
|
| 强制刷新值 | 能够使用强制值刷新某些联系人 | |||
| *高分数 |
EtherCAT从站 设备变量 |
64 | ||
|
CJ单元设备 扫描变量,AT(分配 目的地)指定的变量 |
- | |||
| MC调试* 10 |
要检查从SYSMAC Studio中的运动行为或接线 功能 |
|||
| 同步 |
在网络连接的时候SYSMAC工作室的项目文件 功能的CPU单元的相同的数据 |
|||
| 差分监视器* 1 | 监视联系人上升或下降的功能 | |||
| *高分* 1 | 8 | |||
|
数据 跟踪 |
样 |
触发跟踪 (单个) |
触发器被建立,并且达到指定数量的样本的 能力来自动停止跟踪 |
|
| 连续追踪 |
数据跟踪执行的继续,Sysmac Studio不断收集跟踪数据的功能 |
|||
| *大并发启动次数 | 4 | |||
| *大记录数 | 万 | |||
|
样品 环 |
*高分数 | 192个变量 | ||
| 采样时间 | 指定任务周期,指定时间,执行采样指令 | |||
| 触发跟踪 |
通过设置触发条件,之前的数据和事件发生后 记录的能力 |
|||
| 触发条件 |
·BOOL型变量上升/ 下降·除BOOL型变量 比较法以外的常量值比较 :=,>,≥,<,≤,≠ |
|||
| 延迟值 | 设置触发器建立之前/之后的采样数量的比率的功能 | |||
| 模拟功能 |
为了模拟在SYSMAC Studio中的CPU单元的操作 功能 |
|||
|
可靠的 功能 |
自我诊断 |
控制器 滚子 异常 |
严重 |
全站故障,部分停站故障,轻度故障, 监控信息,一般信息 |
| 用户错误 |
通过设计任何异常预注册,指令执行 功能造册 |
|||
| 严重 | 8个步骤 | |||
|
** 实用 功能 |
客户资产 保护/ 防错 |
CPU单元名称功能 及串行ID功能 |
在从SYSMAC工作室,项目在线连接 的CPU单元名称的CPU单元和目的地CPU单元上的 功能检查名称是否相同 |
|
|
防护 门功能 |
用户程序 而不恢复信息 传递函数 |
从SYSMAC工作室,在CPU单元读出的数据 的功能,不能疏割 |
||
|
CPU单元 写保护功能 |
从SYSMAC工作室/ SD存储卡,在CPU单元 的功能,可以不写在数据 |
|||
|
项目 的整个文件 保护功能 |
在SYSMAC工作室,通过密码,.smc文件 的功能,以防止你开 |
|||
|
数据保护 (密码拖鞋 Rotekuto)功能 |
在SYSMAC工作室,通过密码,用于POU 功能,以保护* 3 |
|||
| 操作权限认证功能 |
由于操作错误,地方有危害的设备和人员的可能性 的情况下,按照操作权限,以限制网上的操作功能 那功能 |
|||
| 组数 | 五 | |||
|
用户程序执行的 身份验证功能 |
对于特定的硬件(CPU单元) , 除非从Sysmac Studio输入了 用户程序执行ID,否则防止执行 用户程序的功能 |
|||
|
SD 记忆 卡 功能 |
存储类型 | SD存储卡,SDHC存储卡 | ||
|
应用 部署 |
SD记忆卡自动传输功能 * |
当电源的控制器被接通时,SD存储卡 存储在自动加载目录数据,控制器 功能被下载到 |
||
|
SD存储卡程序 传送功能* 9 |
从系统中定义的变量秩的指示SD存储卡 传送这是支付用户程序的功能,则控制器 |
|||
| SD存储卡操作命令 |
用户程序访问SD存储卡从指令 的能力, |
|||
|
从SYSMAC工作室 文件操作 |
用户只控制器文件到SD存储卡 没有,比如文档文件的通用也被保存和阅读 可以 |
|||
|
SD存储卡的寿命检测 功能 |
SD存储卡的寿命,系统定义的变量或事件 功能中Torogu通知 |
|||
|
回到 -UP 功能 * 1 |
SD记忆 卡背面 -UP功能 |
操作方法 |
CPU单元 前面的开关 |
通过操作CPU开关前端开关来备份, 验证和恢复功能 |
|
系统定义的变量 由指令 |
通过操作系统定义变量来备份,整理和 恢复的功能* 13 |
|||
|
Sysmac Studio 存储卡屏幕 |
返回从SYSMAC工作室的SD存储卡操作画面 的功能来执行和验证 |
|||
| 专用指令* 7 | 从专用命令执行备份的功能 | |||
|
防护 门功能 |
SD存储卡 备份 禁止 |
禁止备份到SD存储卡的功能 | ||
|
SYSMAC工作室控制器备份 功能 |
能够使用Sysmac Studio来备份,恢复和 验证设备 |
|||
* 1.仅适用于版本1.03以上的CPU单元
* 2.内嵌ST(梯形图中描述ST语言的梯形图语言元素)
* 3.仅适用于版本1.01以上的CPU单元
* 4.仅适用于
CPU版本1.06或更高版本* 5. 仅适用于 1.10版或更高版本的CPU单元
* 6.仅适用于
版本1.05或更高 版本的CPU单元* 7.仅可用于CPU单元版本
。**可用形式NJ301 CPU单元1.10或更高
* 9. CPU单元Ver.1.11仅起始
* 10的形式NJ101-9000不可用
* 11.形式NJ501-1□20 CPU单元Ver.1.08或更高它是2。
* 12.当使用NJ501 CPU单元版本1.00时,它将是2.
* 13.恢复只能用于CPU 版本1.14 或更高版本

