







Motionnet 型驱动器

是通过串行通信系统Motionnet从中心控制电机控制LSI:G9103B来控制运动的驱动器。
驱动器需要独特的设置,例如每个电机的电流,因此请与电机一起购买。
规格
电机驱动器零件规格
| 自适应电机 | PSM-20系列 | PSM-28系列 | PSM-42系列 | PSM-56系列 | PSM-60系列 |
|---|---|---|---|---|---|
| 驱动模型 | PSD-M-20系列 | PSD-M-28系列 | PSD-M-42系列 | PSD-M-56系列 | PSD-M-60系列 |
| 输入电压 | 24VDC ± 10% | |
|---|---|---|
| 控制方式 | 使用基于 ARM 的 32 位 MCU 进行闭环控制 | |
| 能量消耗 | 500mA Max(不包括电机电流和刹车电流(使用刹车时)) | |
| 环境指标 | 温度 |
工作环境温度:0~50℃(无凝露) 存储环境温度:-20~70℃(无凝露) |
| 湿度 |
工作环境湿度:35-85% RH(无凝结) 存储环境湿度:10-90% RH(无凝结) |
|
| 抗冲击性 | 0.5G | |
| 对应标准 |
CE 标志: EN61800-3: 2004 / A1: 2012 (Environment II C3) RoHS 指令:2011/65 / EU |
|
| 功能* 2 | 转速 | 0-3000转*1 |
| *大指令脉冲频率 | 500k [PPS] | |
| 分辨率 (P/R) |
500, 1000, 1600, 2000, 3600, 4000, 5000, 6400, 7200, 10000 (由拨码开关设定) **PSM-20系列编码器的*大分辨率为4,000[P/R](乘以4)。 [注意] 关于编码器反馈输出 ,无论上面设置的分辨率如何,PSD-S-20 的输出 固定为 4000 P/R(4 倍),PSD-S-28 的输出固定为10000 P/R(4 倍)-60. 将完成。 |
|
|
保护功能 (报警输出) |
过流、超速、位置跟踪、过载、过热、再生电压、电机连接、编码器连接、 电机电压、定位完成、ROM、定位误差过大 |
|
| LED显示屏 | 电源、伺服ON状态、报警、定位完成 | |
| 工作电流*3 |
50%~150%(由参数设定程序设定) 运转电流是电机运转(旋转)时流过电机的电流值,根据电机 额定电流设定。 * 出厂设置为 100% |
|
| 停止电流 |
20%~100%(由参数设定程序设定) 电机停止后0.1秒设定停止电流的设定值。 停止电流值是与电机额定电流的比值。 * 出厂设置为 50%。 |
|
|
刹车 (可选) |
自动输出 I/F:根据电机停止时的FET 输出 |
|
* 1 *大转速因分辨率而异。分辨率达到 10,000 时的*大转速为 3,000 rpm。
*2 有关功能的详细信息,请参阅使用说明书中的“B5. 操作显示和设置”。
* 3 工作电流参见使用说明书“6.参数设置程序”。
* 4 准备超过以下公式所需容量的直流电源。
(额定电流/相+驱动器电源电流+制动器额定电流)x 24V
示例。对于 PLS-S-42M-BK (1.2A + 0.5A + 0.2A) x 24V = 45.6W
*2 有关功能的详细信息,请参阅使用说明书中的“B5. 操作显示和设置”。
* 3 工作电流参见使用说明书“6.参数设置程序”。
* 4 准备超过以下公式所需容量的直流电源。
(额定电流/相+驱动器电源电流+制动器额定电流)x 24V
示例。对于 PLS-S-42M-BK (1.2A + 0.5A + 0.2A) x 24V = 45.6W
串行通信和运动控制单元规格
| 串行通讯和运动控制 |
配备串行通信系统Motionnet运动控制专用LSI *1 :Motionnet电机控制LSI:G9103B(Nippon Pulse Motor Co., Ltd.制造) |
|
|---|---|---|
|
串行 通讯 Motionnet |
循环通讯时间和传输周期 |
通信时间 *大 15.1us 传输周期 使用 32 个单元时*大 0.49msec #1 使用 64 个单元时*大 0.97msec #2 (传输速度 20Mpps,我们推荐的电缆 #1:100m,#2:使用 50m 时) |
| 数据通讯时间 |
*大 19.3us (当G9103B的移动量设置寄存器写入 4 字节移动量时) |
|
| 通信线路总长度 |
*大 100m(传输速度 20Mbps,连接 32 台时) *大 50m(传输速度 20Mbps,连接 64 台时) *大 100m(传输速度 10Mbps,连接 64 台时) (使用我们推荐的电缆) |
|
| 界面 | 脉冲变压器和RS-485规范线路收发器 | |
| 协议 | Motionnet 协议(原始) | |
| 串口通讯代码 | NRZ代码 | |
| 串行通讯方式 | 半双通讯 | |
| 连接方式 | 使用 LAN 电缆或专用电缆进行多点连接 | |
| 设备编号 | 设备编号 0 至 63 可设置 通过开关选择 | |
| 传输速度 | 20Mbps / 10Mbps / 5Mbps / 2.5Mbps 通过开关选择 | |
| 终端电阻设置 | 由终端电阻设置开关设置到串口线末端 | |
| 参考时钟 | 80 MHz(用于 G9103B) | |
|
运动 控制 |
插值函数 | 每段任意2轴圆弧,*多64轴直线插补 |
| 定位控制范围 | -134,217,728 至 +134,217,727(28 位) | |
|
减速点 设定范围 |
0 到 16,777,215(24 位) | |
| 速度设定寄存器数 | FL、FH、FA三种(校正速度) | |
| 速度设定步长范围 | 1 到 100,000(17 位) | |
| 加减速特性 | 加/减速可独立设置为直线加/减速和S形加/减速两种。 | |
| 加速度设定范围 | 1 至 65,535(16 位) | |
| 减速率设定范围 | 1 至 65,535(16 位) | |
|
减速点 自动设置 |
(减速时间)<(加速时间×2)可自动设定 | |
|
FH校正功能 (三角驱动回避) |
加速时开始减速的三角驱动,移动量小 定位运行时自动降低运行速度,避免三角驱动 | |
| 柜台 |
COUNTER1:指令位置计数器(28 位) COUNTER2:机器位置计数器(28 位)COUNTER3 :偏差计数器(16 位) |
|
| 比较器 | 28 位 x 3 电路 | |
| 电机指令速度 |
*大6.6Mpps,*小0.1pps (G9103B输出的脉冲控制信号内部连接电机驱动器) |
|
| 预先登记 | 1 步(可自动连续写入) | |
| 编码器输入 |
编码器A、B、Z相输入 (电机驱动信号内部接G9103B的EA、EB、EZ端子) |
|
| 机械输入 |
限位、减速、原点、同时启动/停止、锁存、紧急停止、2个通用输入 ・从输入/输出连接器输入并连接到G9103B端子 ・I/F:光耦合器输入 |
|
| 机械输出 |
比较器、报警、定位完成、通用输出2点 ・G9103B端子输出 ・I/F:光电耦合器输出 |
|
| 内部控制 |
电机励磁ON,报警复位 ,由G9103B通用输入/输出控制 |
|
方面
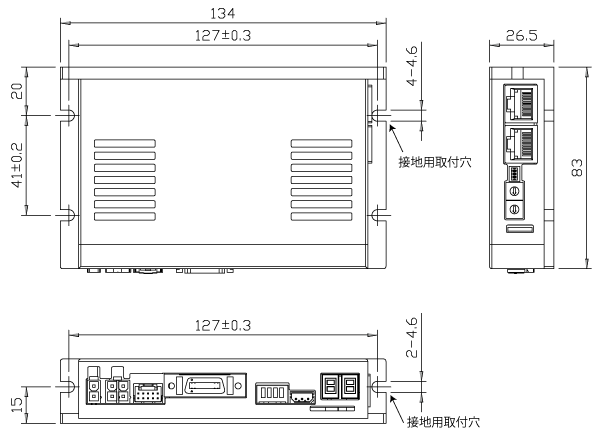
* 点击放大。
系统配置图
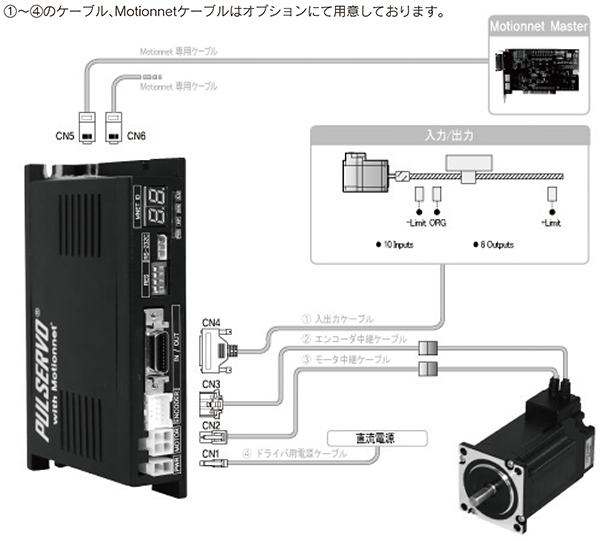
* 点击放大。
输入/输出信号(CN4)
| 密码 | 功能 | 输入输出 |
|---|---|---|
| 1 | + 限制 | 输入 |
| 2 | -限制 | 输入 |
| 3 | 慢一点 | 输入 |
| 四 | 起源 | 输入 |
| 五 | 同步启动 | 输入 |
| 6 | 同步停止 | 输入 |
| 7 | 在 1 | 输入 |
| 8 | 在 2 | 输入 |
| 9 | 锁存器 | 输入 |
| 十 | 肌电图。停止 | 输入 |
| 11 | 出 1 | 输出 |
| 12 | 出 2 | 输出 |
| 13 | 比较 比较 | 输出 |
| 14 | 警报 | 输出 |
| 15 | 就位 | 输出 |
| 16 | 刹车 + * | 输出 |
| 17 | 刹车- * | --- |
| 18 | 数控 | --- |
| 19 | 24GND(外部) | 输入 |
| 20 | 24V(外部) | 输入 |
* 刹车是一种选择








